
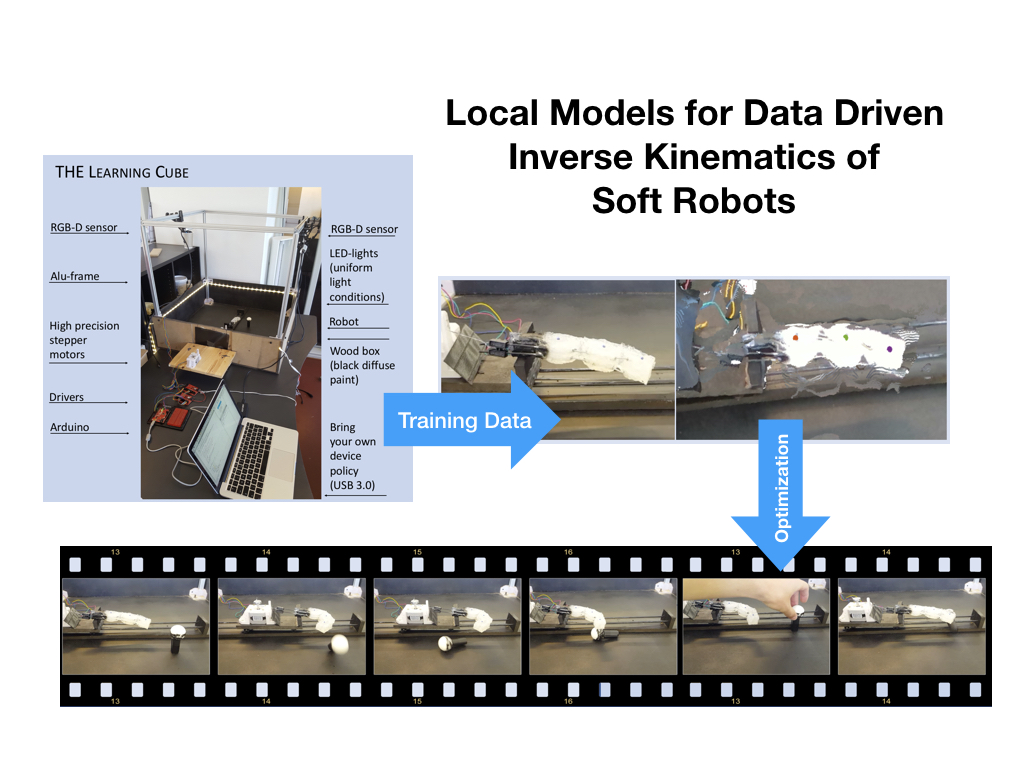
Local Models for Data-Driven Inverse Kinematics of Soft Robots
New agile and in-expensive computer vision approach to training soft robots
Best Poster Prize
Authors
Fredrik Holsten, Sune Darkner, Morten P. Engell-Nørregård, and Kenny Erleben
Abstract
Soft robots are attractive because they have the potential of being safer, faster and cheaper than traditional rigid robots. If we can predict the shape of a soft robot for a given set of control parameters, then we can solve the inverse problem: to find an optimal set of control parameters for a given shape. This work takes a data-driven approach to create multiple local inverse models. This has two benefits: (1) We overcome the reality gap and (2) we gain performance and naive parallelism from using local models. Furthermore, we empirically prove that our approach outperforms a higher-order global model.
Code
https://github.com/erleben/pySoRo
Video