
2019 Summer of Contact PhD School
Course Description
Fast simulations are attractive for many reasons. They allow human users to use training simulators, or play computer games, or do rapid digital prototyping in CAD/CAM software. Fast simulators are valuable for learning control policies in robotics too. Here the ability to run many fast simulations in parallel is key to lowering the training time and obtain a control policy. For the past decade, fast numerical methods have been driven forward by game physics and interactive simulation. Particular the computer graphics field has contributed to a wide range of exploratory research into different numerical methods and several acceleration techniques. The field has now reached a point where computing power is plenty and numerical methods converge sufficiently well such that we are now observing the actual true effects of the models we use inside these types of simulators. The effects we can now observe are not attributed to “hacks” or “numerical” damping in the software implementation. Rather, we see the true models for what they are. Unfortunately, we are now also marveled by how badly simulations work. Particular in Robotics the reality gap often refers to simulators not being able to deal with the real world. In for instance in robotics applications, it can be rather surprising to discover that Coulomb's friction law is only accurate for a very limited range of stiff and dry materials with very rough surface geometry. The world, in general, is nothing like that. So how should we go about creating models that better describe the real world and still have fast simulations? How are we going to get data for such models? How are we going to control the parameters of the models? Finally, even more importantly how are we going to validate and benchmark such models? These are the questions that we try to unveil in this Ph.D. summer school course. To bridge the reality gap from a simulation viewpoint can be popularly phrased as we want fast simulators that can deal with crappy and shitty robots in a bad world. The question is now how to do that?
Contact models exist at various scales. For instance, at nanoscale atomic effects are appropriate to include to model effects of atomic repulsion and at the continuum level elasticity, plasticity, and viscosity describe how small surface asperities account for the friction effects we observe on the every-day human scale. Effects such as lubrication, adhesion, and magnetism are also well described at the continuum level. However, in fast simulation methods we often only describe the perceived every-day human-scale effects of all these fine-scale models. For instance, friction forces (distributions) are often described using a multi-set law that can be presented as an algebraic equation testing for inclusion in a cone. Given such macroscopic descriptions of friction as cones are particularly useful for the type of numerical methods most sought. It is rather well known how to compute contact force solutions as non-smooth root search problems using such a mathematical formalism to express the physical laws. It is interesting to consider how new macroscopic contact models could disrupt the past 30 years or so research in creating fast numerical methods for simulators.
Learning Objectives
After this course the participants will be able to:
- Account for the derivation of the Newton Euler equation, the equations of motion used in most multibody dynamics simulators. (Jeff Trinkle)
- Describe the difference between the state-of-the-art macroscopic friction models used in fast simulators. Such as NCP, LCP, BLCP, SOCCP, Convex, etc. (Jeff Trinkle)
- Explain how to obtain microscopic surface data and measure the roughness of such surfaces, the definition of fractal dimension (Jeppe Revall Frisvad)
- Describe how statistics of micro-facets and simulations are used for creating BRDF models (Jeppe Revall Frisvad)
- Explain how position-based dynamics is related to continuum models and constitutive equations (Mihai Francu)
- Describe how to formulate a non-smooth Newton method for solving multibody dynamics as a fully coupled system (Miles Macklin)
- Explain theory from single-contact mechanics to asperity-based statistical models for describing macroscopic frictional systems (Julien Scheibert)
- Account for the state-of-the-art in improving the performance of direct methods for solving multibody systems with contact modeled as LCPs (Sheldon Andrews)
- Argue for quality on contact point generation (Kenny Erleben)
- Describe fundamentals of finite elements for elastic models and the challenge of frictional contact in such simulations, particular explain concepts behind Hertzian contact models (Paul G. Kry)
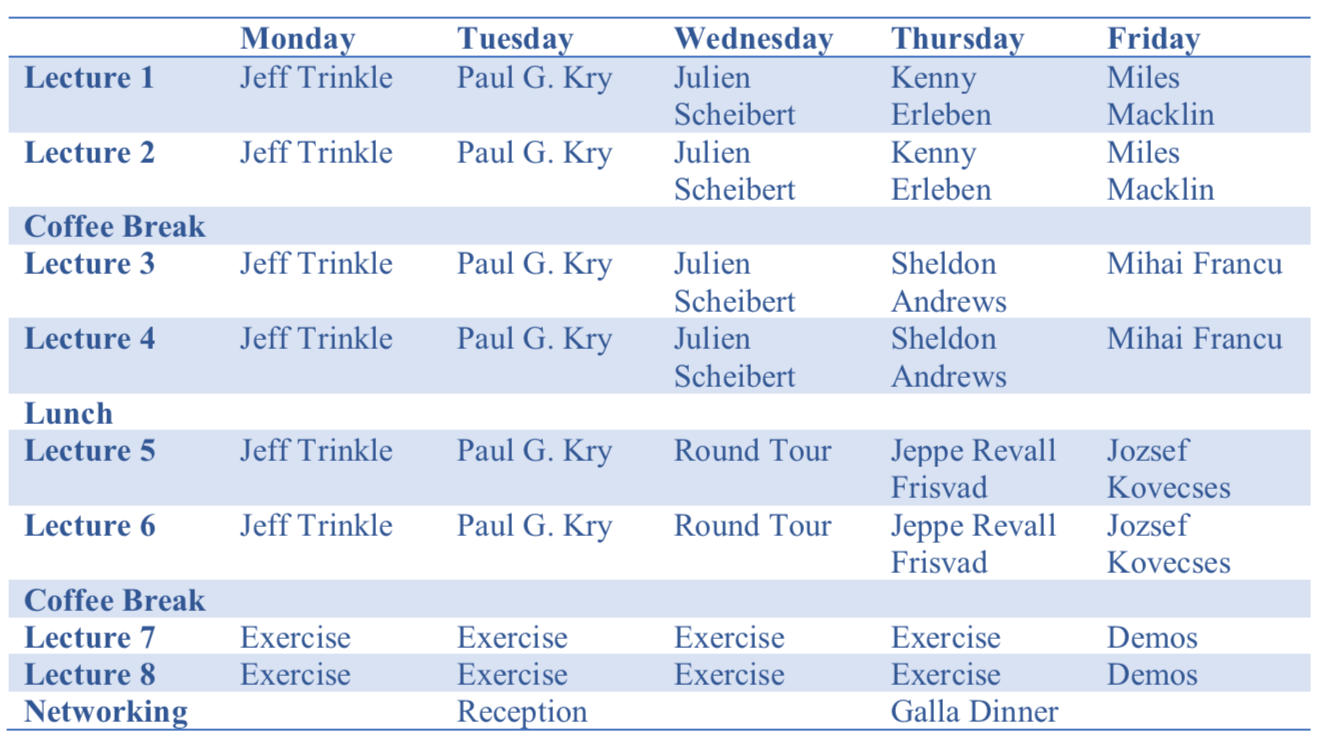
Tentative Detailed Schedule
(Maybe subject to change)
Lectures approximately 45 minutes, coffee breaks 15 minutes, lunch 60 minutes. We start days at 9:00 AM
Syllabus
(More will be added later)
- I. Vakis, V.A. Yastrebov, J. Scheibert, L. Nicola, D. Dini, C. Minfray, A. Almqvist, M. Paggi, S. Lee, G. Limbert, J.F. Molinari, G. Anciaux, R. Aghababaei, S. Echeverri Restrepo, A. Papangelo, A. Cammarata, P. Nicolini, C. Putignano, G. Carbone, S. Stupkiewicz, J. Lengiewicz, G. Costagliola, F. Bosia, R. Guarino, N.M. Pugno, M.H. Müser, M. Ciavarella: Modeling and simulation in tribology across scales: An overview, Tribology International, Volume 125, 2018.
- Tristan Baumberger & Christiane Caroli (2006) Solid friction from stick–slip down to pinning and aging, Advances in Physics,
- Kenny Erleben: Methodology for Assessing Mesh-Based Contact Point Methods, ACM Trans. Graph. August 2018.
- Nicodemus, F. E., Richmond, J. C., Hsia, J. J., Ginsberg, I. W., and Limperis, T. Geometrical considerations and nomenclature for reflectance. Tech. rep., National Bureau of Standards (US). October. 1977.
Speaker Biographies
 |
Julien Scheibert's research topics lie at the interface between physics and mechanics. In particular, he develops coupled experimental/modeling approaches to the contact mechanics of rough solid surfaces. He applies them to understand various phenomena including human tactile perception, the dynamics of the onset of sliding, or the roughness noise. |
 |
Paul G. Kry is an associate professor at McGill University in the School of Computer Science where he heads the Computer Animation and Interaction Capture Laboratory. He received his B. Math. in computer science with electrical engineering electives from the University of Waterloo, and his M.Sc. and Ph.D. in computer science from the University of British Columbia. He is currently a director at large on the ACM SIGGRAPH executive committee and is the president of the Canadian Human-Computer Communications Society, the organization which sponsors the annual Graphics Interface conference. |
 |
Jeppe Revall Frisvad is an associate professor at the Technical University of Denmark (DTU). He received and an MSc(Eng) in applied mathematics and a Ph.D. in computer graphics both from DTU. Jeppe has more than 10 years of experience in material appearance modeling and rendering. As a highlight, his work includes the first directional dipole model for subsurface scattering, and his research on material appearance includes methods for both computation and photographic measurement of the optical properties of materials. |
 |
In 1987, Jeff Trinkle received a Ph.D. from the Department of Systems Engineering at the University of Pennsylvania. He is now Professor of Computer Science, Professor of Electrical, Computer, and Systems Engineering, and Director of the CS Robotics Lab. Trinkle's primary research interests lie in the areas of robotic manipulation and multibody dynamics. Under the continuous support of the National Science Foundation since 1989, he has written many technical articles on theoretical issues underpinning the science of robotics and automation. One of these articles was the first to develop a now-popular method for simulating multibody systems. Variants of this method are key components of several physics engines for computer game development, for example, NVIDIA PhysX and the Bullet Physics Library. |
 |
Kenny Erleben is an Associate Professor in the Department of Computer Science, University of Copenhagen. He completed his Ph.D. in 2005. His research interests are Computer simulation and numerical optimization with particular interests in computational contact mechanics of rigid and deformable objects, inverse kinematics for computer graphics and robotics, computational fluid dynamics, computational biomechanics, foam simulation, interface tracking meshing. |
 |
Sheldon Andrews is a professor of Software and IT Engineering at the École de Technologie supérieure in Montreal, Canada. He received his Ph.D. in Computer Science in 2015 from McGill University, and more recently he was a postdoctoral researcher at Disney Research in Edinburgh (2014-2015) and then CMLabs Simulations in Montreal (2016). His research interests include real-time physics simulation, simulation of articulated mechanisms, 3D character animation, human motion synthesis and motion capture, computational contact mechanics, and measurement-based modeling for virtual environments. |
 |
Miles Macklin is a computer graphics and simulation researcher working for NVIDIA on the PhysX team. Currently based in Auckland, New Zealand, Macklin previously worked at LucasArts in San Francisco on the StarWars franchise, Rocksteady Studios in London on the Batman Arkham series, and Sony Computer Entertainment Europe on early Playstation3 development. His research interests are real-time rendering and physics simulation using GPUs. Macklin is currently enrolled as a PhD Student at the University of Copenhagen. |
 |
Mihai Francu is an experienced senior programmer and a computer science researcher focusing on mechanical dynamics simulation. His interests lie at the confluence of computer graphics and animation, physics and applied mathematics. Francu has an extensive industrial background in games and physics engines his main expertise is mainly in constrained based methods, cloth simulation, and modeling contact and friction. |
On Advances in Macroscopic Friction Modelling for Fast Simulators used in Robotics, Engineering and Computer Graphics
Dates
5 full-day course running from 12 August 2019 to 16 August 2019.
Invited Guest Lectures
- Professor Paul G Kry
- Professor Jeff Trinkle
- Professor Julien Scheibert
- Professor Jeppe Revall Frisvad
- Professor Sheldon Andrews
- Postdoc Mihai Francu
- Ph.D. Miles Macklin
- Professor Kenny Erleben
Registration
Participation fee: €250.
Registration deadline: 22 July 2019.
Only 30 seats.
No longer possible
Location
Københavns Marineforening
Takkeladsvej opg. 3 Holmen
1439 København K
Find the location on Google Maps:
